The award is the MAST CTA, the Micro Autonomous Systems and Technology Collaborative Technology Alliance, and will incorporate more than $22 million in funding during 10 years from the Army Research Laboratory.
Penn will lead the multi-university research initiative tasked with creating cohesive teams of autonomous robots that can function effectively in urban and complex terrain. Participating universities will build new robotic systems, study novel approaches for robotic control and perception and develop new algorithms for intelligent operation of robots in unstructured environments. The goal is autonomous machines that operate with little or no direct human supervision and can support security or rescue personnel operating in dangerous environments. In venues as disparate as buildings and caves, the machines must be able to organize into sub-teams and clear and secure areas, track hostile targets in a three-dimensional environment and find victims or explosive devices by crawling, climbing, flying or hovering.
Vijay Kumar, chair of the Department of Mechanical Engineering and Applied Mechanics, will lead the consortium, consisting of the University of California, Berkeley; Georgia Institute of Technology; the University of New Mexico; Massachusetts Institute of Technology; the Australian Center for Field Robotics; Vanderbilt University; and the University of Maryland. Using expertise in algorithms, artificial intelligence, communications, control theory, perception, robotics, sensing, signal processing and systems engineering, the Penn program, Autonomous Multifunctional Mobile Microsystems, will design a networked group of mini aerial and ground vehicles and sensors operating in dynamic environments. The project will look to nature for inspiration to create these machines and develop intelligent group behaviors that allow the network to perform tasks that cannot be performed individually.
Scaling down today’s robots to tomorrow’s micro-robots raises many technical challenges including perception and control with small sensors, actuators and processors; communication between members of the team with low-power antennas; and the development of intelligent group behaviors with small-scale, resource-constrained robots.
“Our goal is to combine scientific principles with new engineering technologies to make autonomous aerial and ground robots work together, work independently, adapt, survey and ultimately become a reality in the field,” said George Pappas, professor of electrical and systems engineering and deputy dean Penn Engineering.
Penn engineers and collaborators have developed a transparent, micro-engineered device that houses a living, vascularized model of human lung cancer—a “tumor on a chip”—and show that the diabetes drug vildagliptin helps more CAR T cells break through the tumor’s defenses and attack it effectively.
Tumor-on-a-chip offers insight into cancer-fighting cells in immunotherapy
Penn engineers and collaborators have built a living tumor on a chip to expose how cancers block immune attacks, and how one existing drug could make immunotherapy like CAR T more effective against solid tumors.
Professor of city and regional planning Erick Guerra recently published a book exploring the economic and societal impacts of American highways. He explains some of the pitfalls associated with an ever-expansive highway system, arguing that spending more on highways might not be the solution to the country’s transportation issues.
Penn urban planner Erick Guerra’s new book, “Overbuilt,” argues that additional spending on building more highways might not be the solution to the country’s transportation issues. In a Q&A, Guerra shares his insights.
Xin Sun prepares samples collected from the Eastern Tropical North Pacific aboard a research vessel. By adding stable isotope tracers to these vials, Sun and her team can track how different microbial groups convert nitrogen compounds into nitrous oxide, revealing how subtle shifts in oxygen and organic matter change the ocean’s chemistry.
Can tiny ocean organisms offer the key to better climate modeling?
In the shadowy layers of the Pacific, microbes decide how much nitrous oxide—a potent greenhouse gas—rises skyward. New research from Penn’s Xin Sun offers an improved understanding of microbial ecology and geochemistry—key to forecasting global emissions in response to natural and man-made climate change.
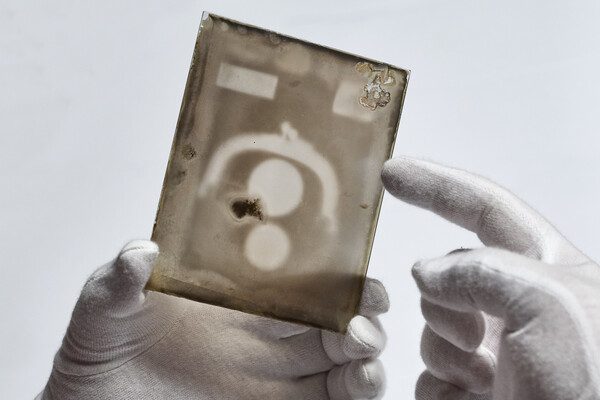
Two X-ray plates from Arthur Goodspeed, believed to have created the world’s first X-ray image, were donated by his family to Penn’s University Archives.