Designing autonomous robots that change shape to adapt to challenging environments
Researchers at Penn’s ModLab have developed SMORES-EP, a robotic system capable of giving machines increasing autonomy. A recent paper details their work.
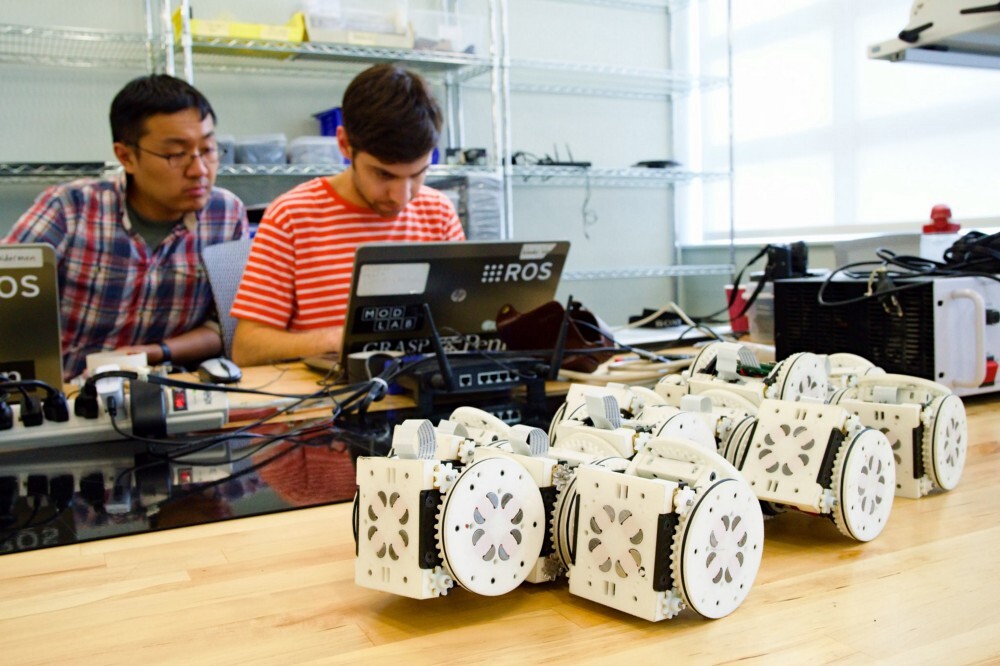
SMORES-EP in a “snake” configuration, ideal for traversing stairs. Tracked by the sensor module in the center, individual SMORES-EP modules can connect in different ways, depending on the task at hand.
A robot can assemble a car door or pack a box much faster and more efficiently than any human, but such single-purpose machines struggle when asked to perform in challenging environments that contain elements such as stairs or tunnels.
Robotics researchers are aiming to design robots that can sense and interact with features of never-before-seen environments to give machines increasing autonomy. To achieve this, robots must be able to sense features of unpredictable and new environments and then interact fluidly within them.
Penn’s ModLab explores how robots can adapt to their surroundings and solve problems for which they weren’t explicitly programmed. The lab, directed by professor Mark Yim, is part of the GRASP Lab and is based at PERCH in the Pennovation Center.
An individual SMORES-EP module. The electro-permanent magnets on the module’s wheels mean they can connect with and manipulate other modules.
ModLab has recently published a new study on its SMORES-EP system, or Self-Assembling Modular Robots for Extreme Shapeshifting. Composed of individual cube-shaped modules that sport protruding wheels, the modules can self-assemble to form various structures thanks to hinged faces that contain electro-permanent magnets. An early demonstration showed that SMORES-EP can use objects such as blocks or ramps to accomplish tasks or self-reconfigure to a shape more appropriate for a task.
Now the updated SMORES-EP system can autonomously analyze an environment, and then reconfigure and transform its shape to navigate through any environment, even entirely new ones.
Yim, a professor in the Department of Mechanical Engineering and Applied Mechanics in the School of Engineering and Applied Science, and Tarik Tosun, a recent Ph.D. graduate of Yim’s lab, published the study demonstrating these new abilities in the journal Science Robotics. They collaborated with professors Hadas Kress-Gazit and Mark Campbell, co-directors of the Autonomous Systems Laboratory at Cornell University’s Sibley School of Mechanical and Aerospace Engineering, along with lab members Jonathan Daudelin and Gangyuan Jing.
Tarik Tosun, behind the computer, works on SMORES-EP while Cornell co-author Gangyuan Jing looks on.
Penn’s Tosun and Yim previously used an algorithm to teach the SMORES-EP how to bypass an obstacle. To adapt to challenging environments, the robot used building blocks to construct ramps and bridges that let it overcome obstacles. Humans do this often; we use ladders to reach high places, or use a bridge to cross a river. The SMORES-EP can now perform tasks without tools by transforming its shape based on an environment. This would be the equivalent of a human stretching 30 feet high instead of using a ladder.
“We’ve put together a system that allows the robot to enter a new environment and then reconfigure appropriately in order to gain access to the capabilities it needs to complete tasks,” says Tosun.
The SMORES-EP robot constantly 3D maps the environment in which it has been placed, while simultaneously using environment characterization tools and algorithms. The robot also has an interactive system connected to a library of configurations and behaviors. The library contains options for different kinds of bodies the robot could transform into based on different limitations recognized in an environment, for instance transforming into a snake-like configuration after encountering stairs.
A high-level planning framework allows the user to provide a task in structured English, so if Tosun instructs SMORES-EP to retrieve a brightly colored object and then place it in a designated area, the robot can transform itself into an appropriate shape to overcome constraints or obstacles along the way.
“Say a desired object is placed in an area that’s too narrow for the current configuration to drive into,” says Tosun. “Using environment characterization tools, the system can process 3D map data to classify the current environment as having the ‘tunnel’ property, and then search its library for a configuration capable of operating in a tunnel. If it finds one, it can use a reconfiguration algorithm to transform from the current configuration into an appropriate shape, and retrieve the object.”
“The robot could begin in a car configuration, to drive around and explore, and then when it comes upon an object it has been tasked with retrieving from a tunnel, the robot then reconfigures into a shape with an arm to reach into the tunnel,” Tosun adds.
This flexibility is unprecedented in the field, Tosun explains, and has potential applications in situations that are dangerous for humans, such as search and rescue missions in disaster areas.
“The idea that these systems could respond to unknown environments by reconfiguring autonomously has been a driving motivation in the field of modular robotics since the beginning,” he says. “Imagine the robot is sent into a disaster site, where the performance requirements are not directly obvious until the robot enters and maps the area. Environments like disaster areas, where the robots will need to accomplish all sorts of tasks in all sorts of configurations, are where reconfigurable robots like SMORES-EP will shine.”
There are slightly more mundane, less Transformer-like examples, too: Houses are often very complicated and dynamic environments, including things like staircases or maybe clutter. If we want robots to navigate our homes, they’ll need to respond to their environment and circumstances by changing constantly, which SMORES-EP can do by mapping the environment and then transforming into different configurations, remaining entirely flexible.
“Flexibility is key in robotics,” says Tosun. “A lot of multi-purpose robotic systems are quadrupeds and bipeds with many degrees of freedom, and we know from biology these designs can be very general-purpose, but in many scenarios, they require very complicated control. If a robot can specialize on demand by assuming just the right shape for the task at hand, it can potentially perform a wide range of functions elegantly.”
Novel plant-based approach to a better, cheaper GLP-1 delivery system
Research led by Penn Dental’s Henry Daniell investigates the use of a lettuce-based, plant-encapsulated delivery platform as a new oral delivery of two GLP-1 drugs previously approved by the FDA in injectable form.
No brain, no gain: Neuronal activity enhances benefits of exercise
Research led by Penn neuroscientist J. Nicholas Betley and collaborators finds that hypothalamic neurons are essential for translating physical exertion into endurance, potentially opening the door to exercise-mimicking therapies.
In honor of Valentine's Day, and as a way of fostering community in her Shakespeare in Love course, Becky Friedman took her students to the University Club for lunch one class period. They talked about the movie "Shakespeare in Love," as part of a broader conversation on how Shakespeare's works are adapted.
In Becky Friedman’s English course Shakespeare in Love, undergraduate students analyze language, genre, and adaptation in the Bard’s plays through the lens of love.
Beating the heat: Designing cooling for bodies in motion
Dorit Aviv, director of Weitzman’s Thermal Architecture Lab, studies how humans, technology, and design intersect, paving the way for the development of novel approaches to cooling people efficiently.






{kind=link}
{kind=link}