Even without a brain, metal-eating robots can search for food
When it comes to powering mobile robots, batteries present a problematic paradox: the more energy they contain, the more they weigh, and thus the more energy the robot needs to move. Energy harvesters, like solar panels, might work for some applications, but they don’t deliver power quickly or consistently enough for sustained travel.
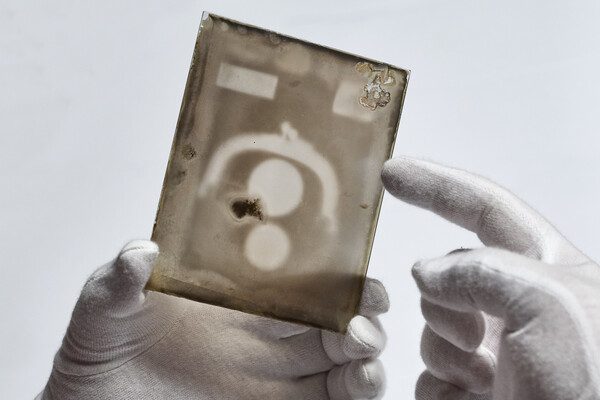
The “metal-eating” robot can follow a metal path without using a computer or needing a battery. By wiring the power-supplying units to the wheels on the opposite side, the robot autonomously navigates away from the tape and towards aluminum surfaces. (Image: Penn Engineering Today)
James Pikul, assistant professor in Penn Engineering’s Department of Mechanical Engineering and Applied Mechanics, is developing robot-powering technology that has the best of both worlds. His environmentally controlled voltage source, or ECVS, works like a battery, in that the energy is produced by repeatedly breaking and forming chemical bonds, but it escapes the weight paradox by finding those chemical bonds in the robot’s environment, like a harvester. While in contact with a metal surface, an ECVS unit catalyzes an oxidation reaction with the surrounding air, powering the robot with the freed electrons.
Pikul’s approach was inspired by how animals power themselves through foraging for chemical bonds in the form of food. And like a simple organism, these ECVS-powered robots are now capable of searching for their own food sources despite lacking a “brain.”
In a new study published as an Editor’s Choice article in Advanced Intelligent Systems, Pikul, along with lab members Min Wang and Yue Gao, demonstrate a wheeled robot that can navigate its environment without a computer. By having the left and right wheels of the robot powered by different ECVS units, they show a rudimentary form of navigation and foraging, where the robot will automatically steer toward metallic surfaces it can “eat.”
Penn engineers and collaborators have developed a transparent, micro-engineered device that houses a living, vascularized model of human lung cancer—a “tumor on a chip”—and show that the diabetes drug vildagliptin helps more CAR T cells break through the tumor’s defenses and attack it effectively.
Tumor-on-a-chip offers insight into cancer-fighting cells in immunotherapy
Penn engineers and collaborators have built a living tumor on a chip to expose how cancers block immune attacks, and how one existing drug could make immunotherapy like CAR T more effective against solid tumors.
Professor of city and regional planning Erick Guerra recently published a book exploring the economic and societal impacts of American highways. He explains some of the pitfalls associated with an ever-expansive highway system, arguing that spending more on highways might not be the solution to the country’s transportation issues.
Penn urban planner Erick Guerra’s new book, “Overbuilt,” argues that additional spending on building more highways might not be the solution to the country’s transportation issues. In a Q&A, Guerra shares his insights.
Xin Sun prepares samples collected from the Eastern Tropical North Pacific aboard a research vessel. By adding stable isotope tracers to these vials, Sun and her team can track how different microbial groups convert nitrogen compounds into nitrous oxide, revealing how subtle shifts in oxygen and organic matter change the ocean’s chemistry.
Can tiny ocean organisms offer the key to better climate modeling?
In the shadowy layers of the Pacific, microbes decide how much nitrous oxide—a potent greenhouse gas—rises skyward. New research from Penn’s Xin Sun offers an improved understanding of microbial ecology and geochemistry—key to forecasting global emissions in response to natural and man-made climate change.
Two X-ray plates from Arthur Goodspeed, believed to have created the world’s first X-ray image, were donated by his family to Penn’s University Archives.




{kind=link}