M. Ani Hsieh’s robotics lab investigates how to use ocean currents as a natural energy source for marine robots, which would enable widespread exploration.
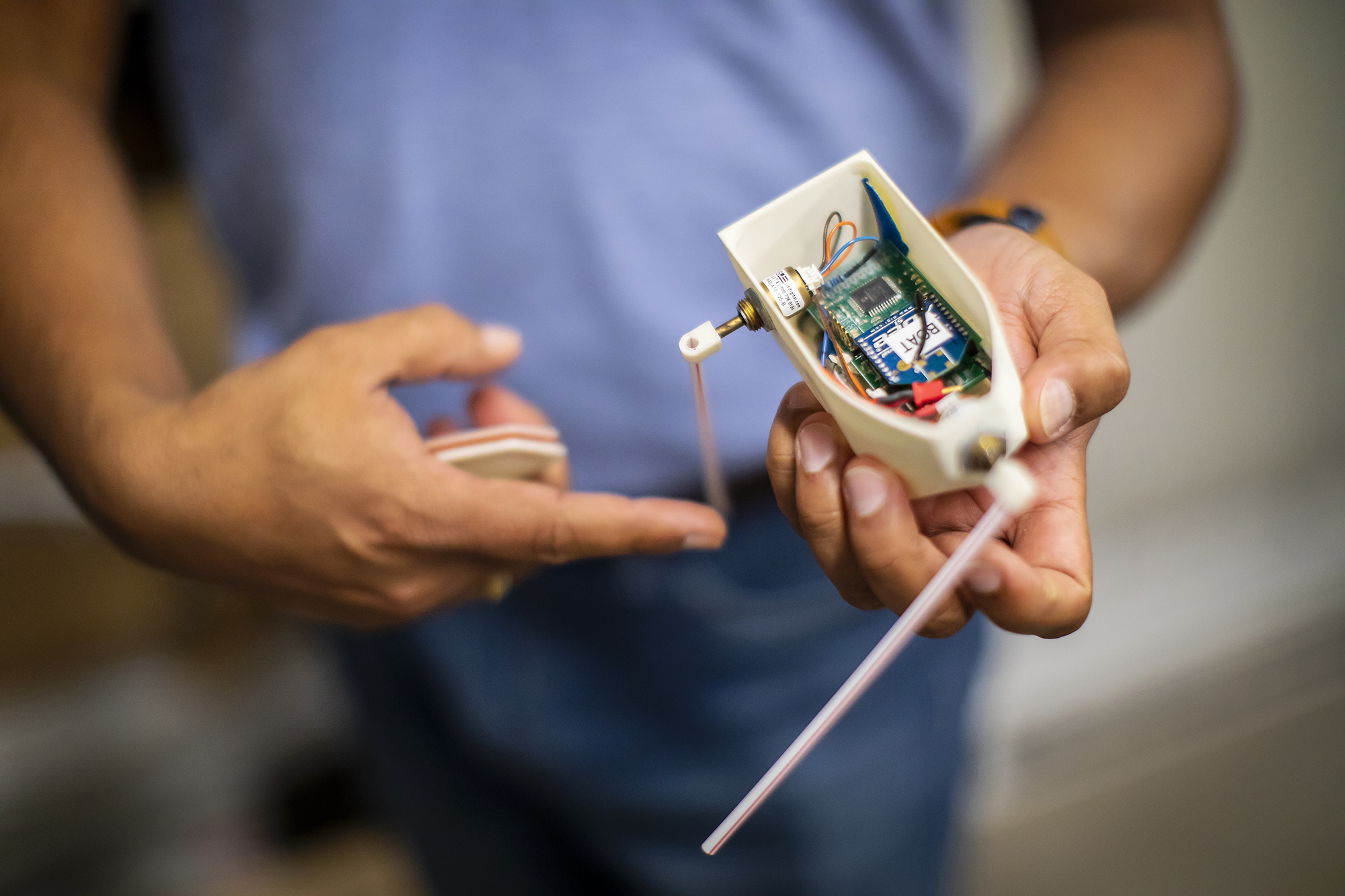
As part of a team in the Scalable Autonomous Robots Lab, post-doctoral researcher Dhanushka Kularatne programs algorithms that enable marine robots like this one to map oceanic currents.
In Penn’s Scalable Autonomous Robots Lab, three researchers watch from a cluster of computer monitors as small black boats navigate through water in a large indoor pool, seemingly battling against artificially produced currents. But the toy-sized, robotic ships aren’t fighting the currents; they’re actually using them to move around.
They’re part of an autonomous fleet being used by M. Ani Hsieh and a team in her lab. Their goal is to enable robots to perform useful tasks across the ocean, fueled by the power of the water’s currents, with the ability to stay in the ocean beyond the lengths of time any manned vehicle could without extensive equipment and fuel.
Hsieh, a research associate professor in the Department of Mechanical Engineering and Applied Mechanics in the School of Engineering and Applied Science, along with postdoctoral researchers Dhanushka Kularatne and Xi Yu, designs algorithms that will allow these robots to map ocean currents. Doing so could help scientists predict climate changes to stay ahead of dangerous weather events, map the potential trajectory of a chemical or oil spill, or even track the debris of a downed aircraft for a search-and-rescue team. By better understanding the current patterns, the robots will also be able to use the currents as a natural energy source to travel farther and longer—and potentially do more.
We’re studying how to predict and protect the oceanic environment, and we’re actually using this same environment as an energy source.
Xi Yu, Mechanical Engineering and Applied Mechanics post-doctoral researcher
“The project really requires the robots to perform long-term and large-scale tours,” says Yu, who sees this research as a nice combination of theoretical and hands-on work. “To achieve this, we utilize the oceanic flow whenever possible.”
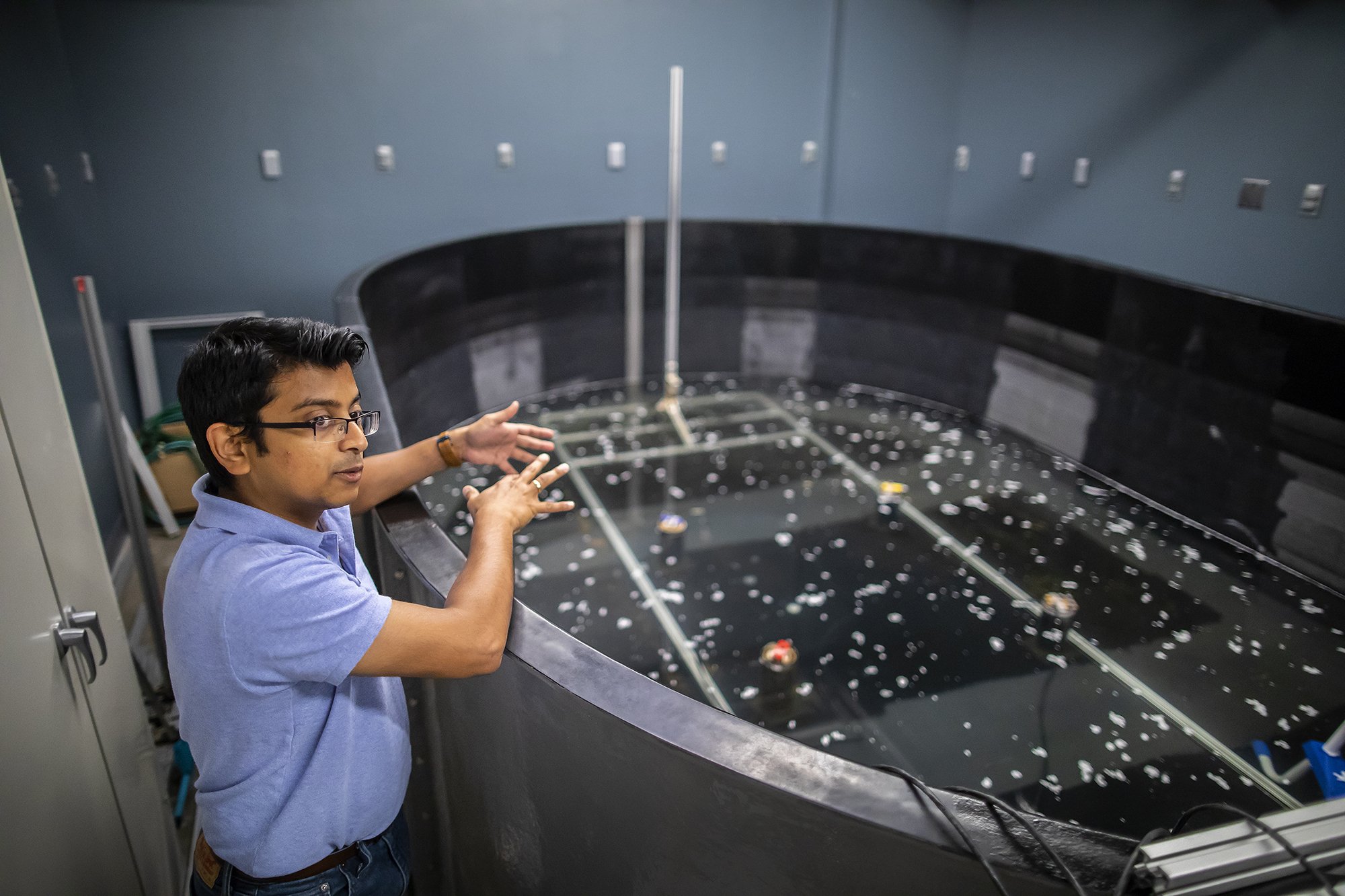
Kularatne explains how the team generates ocean-like flows in a controlled lab environment.
Getting the robots to do this, however, means Hsieh and her team need to be able to conduct experiments in a way that allows them to control the flow conditions in which the robots operate. Instead of conducting experiments in the ocean, the researchers have built a large indoor pool that can generate ocean-like currents in the lab. To test their ideas, the team uses robots—just smaller than a computer mouse—to map the currents created in the pool.
Kularatne and Yu test the robots in the Multi-Robot Coherent Structure Testbed, an ocean-simulating indoor pool that’s 15-feet long, 10-feet wide, and containing 4 feet of water and driving motors that generate artificial currents. This creates a complicated and dynamic environment to test their different strategies for mapping ocean currents and leveraging the currents for navigation.
“Ocean dynamics change based on place and time, so this is a very complex system that exhibits various spatial and temporal scales,” Hsieh says. “A single robot simply wouldn’t provide enough measurements to enable a good reconstruction of how the currents change. This is why using a swarm is truly advantageous, because we now have a number of mobile sensors that simultaneously collect measurements across a wider space and over a longer period of time. They can even adapt formations in order to focus sensing capabilities on regions of interest.”
The team uses autonomous surface vehicles, or mASVs, which measure approximately 12 centimeters in length. Each mASV is equipped with a micro-controller board, which includes the robot’s memory and processing systems, as well as an inertial measurement unit, allowing Kularatne and Yu to track and map the fleet’s movement. To enable communication with the robots, each vessel sports an XBee radio module, which sends and receives wireless messages.
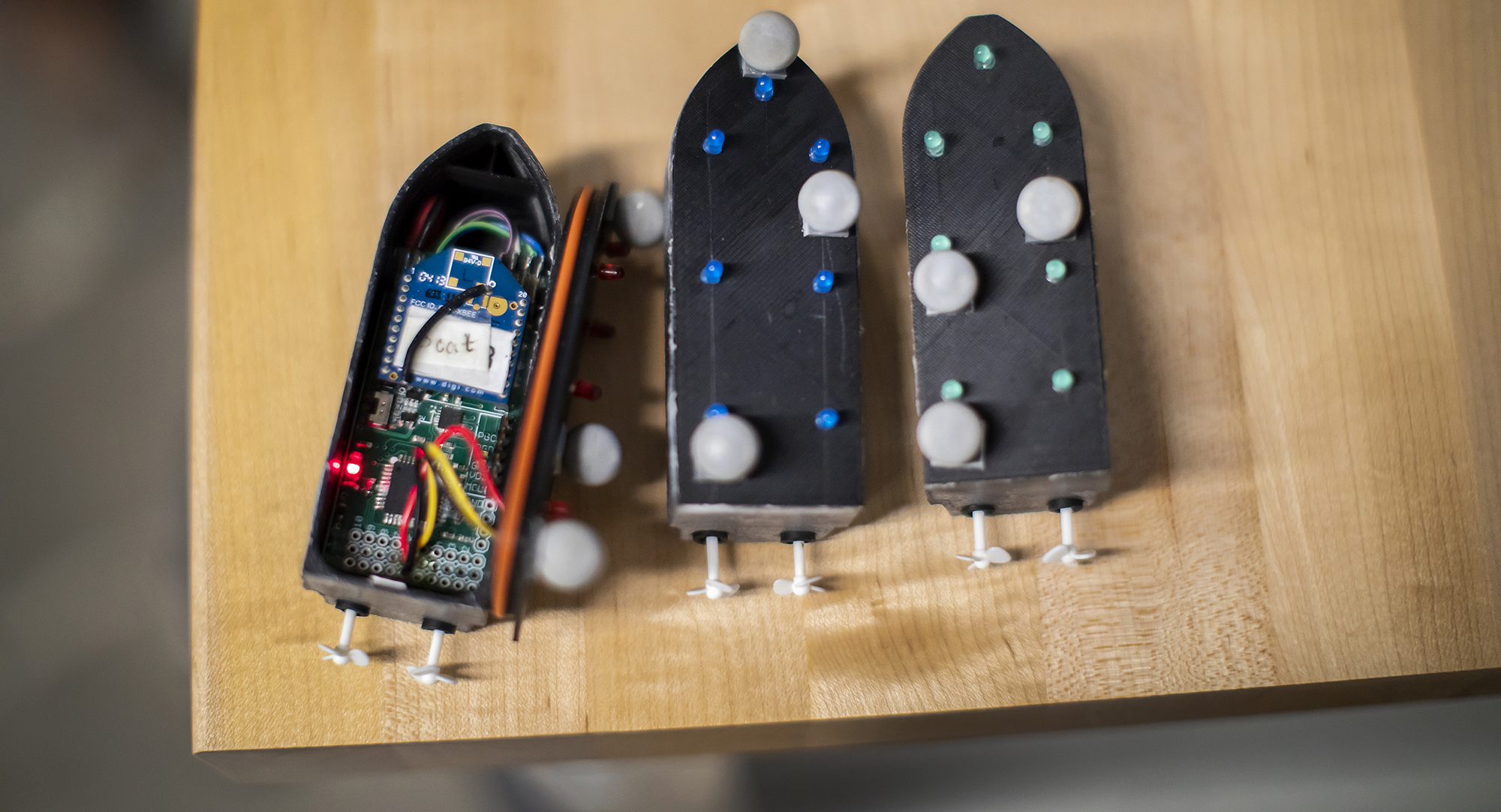
Swarms of these marine robots will eventually monitor climate changes, enable search and rescue missions, and perform various other tasks.
Hsieh, along with current and previous members of the ScalAR lab, designed the pool, driving motors, and vehicles themselves. While this allowed them to create an integrated design, it required a complicated synthesis of interdisciplinary knowledge beyond robotics, such as physics, mathematics, and oceanography. But the robots’ outward appearance masks this technology: They look like small black ships, each with colorful blinking lights and little gray beacons.
Kularatne says he’s most excited about the potential of using the ocean’s currents as energy.
“This will allow the vehicles to operate for longer periods and will reduce the cost of each mission,” he says. “Furthermore, this has applications in autonomous transport in marine environments, harbor and coast guard security, and in monitoring of man-made structures.”
In the future, the team envisions a swarm of aquatic robots that can observe current changes in real time, continuously uploading data to a cloud server. “If you now have the ability to do this online, with a team of robots constantly monitoring oceans, you have the ability to do real-time forecasting and real-time predictions,” Hsieh says. “If you can do that, you can do a better job of monitoring wildlife and natural resources, making sure that in the event of a marine accident, you will actually be more responsive.”
Post-doctoral researcher Xi Yu explains how the lab uses these four motors to generate ocean-like currents.
Plus, Yu adds, there’s a bit of beauty in how this project has evolved. “This idea just seems romantic to me,” she says. “We’re studying how to predict and protect the oceanic environment, and we’re actually using this same environment as an energy source.”
Back in the lab, the team decides to put on a robotic show. The current-creating motors whine, creating four fast whirls in the water. The currents appear much more powerful than the tiny robots, but like synchronized swimmers, the machines use the currents’ movement to follow one another in an increasingly tight circle, with their different-colored lights blinking. Suddenly, the circle of the robots expands, before speeding toward the pool’s center and changing paths to narrowly avoid hitting one another.
Eventually, they race to one end of the pool, shutting down simultaneously—inches from the wall.
In thigh-high waders, Kularatne climbs down a ladder into the pool to carefully extract the robots, holding three machines in the palm of his hand that could change the way we interact with the ocean.
Homepage photo: The Scalable Autonomous Robots Lab, led by M. Ani Hsieh, programs marine robots to not only withstand but also harness the ocean’s currents. The team will program a swarm of the robots to map the currents, which has endless scientific applications.
In Senegal, the ambitious Dakar Greenbelt project seeks to create an extensive network of ecological infrastructure in and around the city to sustainably address environmental concerns and enhance urban life. With support from David Gouverneur and Ellen Neises, Ph.D. candidate Rob Levinthal in the Weitzman School of Design led two courses that included a field trip to Dakar, that culminated in students presenting their visions for parts of the Greenbelt.
From a desert to an oasis: Penn engages in ambitious greening effort in the Sahel
Students from the Weitzman School of Design journeyed to Senegal to help with a massive ecological and infrastructural greening effort as part of their coursework. The Dakar Greenbelt aims to combat desertification and promote sustainable urban growth.
As part of an undergraduate course, Penn faculty and students curated an Arthur Ross Gallery exhibition of works from the Neumann family’s extensive collection of modern and contemporary art.
The University’s nexus for technology transfer supports researchers in their innovative efforts, from CAR T to mRNA advancements that have dramatically reshaped the world.